








Low voltage Integrated Servo Motor, RS485 serial DC servo Motor
RS485 servo motor
$300.00
RS485 integrated servo motor, Low voltage servo Motor, NEMA23 size DC servo Motor.
Integrated Servo Motor, Low Voltage DC servo Motor With Cutomized Cable: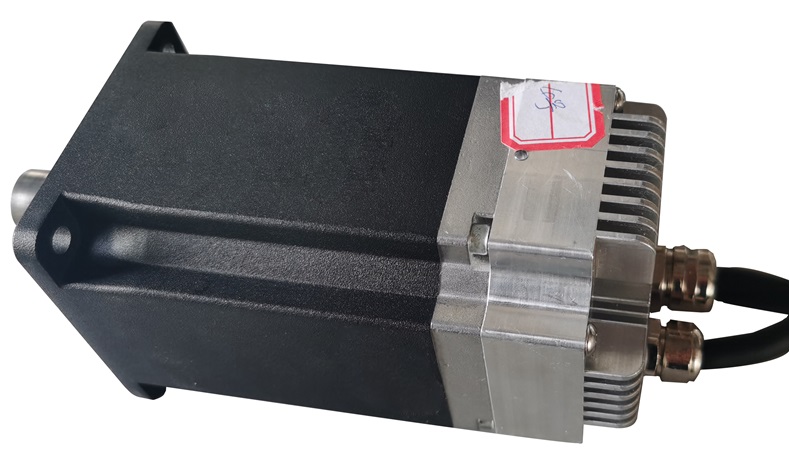
| Item | Specifications |
| Winding connection mode | Star connection |
| Encoder type | 17bit absolute encoder |
| Shaft Radial Play | 0.025mm |
| Radial clearance | 0.06mm@450g |
| Axial clearance | 0.08mm@450g |
| Maximum radial bearing force | 15N@20MM Start with the flange |
| Maximum radial axial force | 10N |
| Insulation grade | B Grade |
| Dielectric strength | 500VAC /minute |
| insulation resistance | Minimum 100Ω, 500VDC |
Motor Parameters
| Model Number | 57AIS61 | 57AIS77 | 57AIS100 |
| Rated voltage(V) | DC24V | DC24V | DC24V |
| Rated power(W) | 32 | 60 | 85 |
| Rated current(A) | 1.9 | 2.9 | 6.2 |
| Rated torque(N. M) | 0.48 | 0.63 | 1.45 |
| Peak torque(N. M) | 0.72 | 0.95 | 2.18 |
| Rated speed(RPM) | 1200 ±10% | 1000 ±10% | 1100 ±10% |
| Max speed(RPM) | 1800 ±10% | 1700 ±10% | 2100 ±10% |
| Cable resistance(Ω) | 2.73 ±10% | 1.52 ±10% | 0.73 ±10% |
| Cable inductance(MH) | 1.15 ±20% | 0.62 ±20% | 0.27 ±20% |
| Torque coefficient(NM/A) | 0.135 | 0.132 | 0.115 |
| Electrical time constant(MS) | 0.421 | 0.408 | 0.37 |
| Length(MM) | 61 | 77 | 100 |
| Pole | 14 | ||
| Level of protection | Ip65 | ||
| Motor insulation class | Class F | ||
Mechanical Dimensions and Wiring Diagram: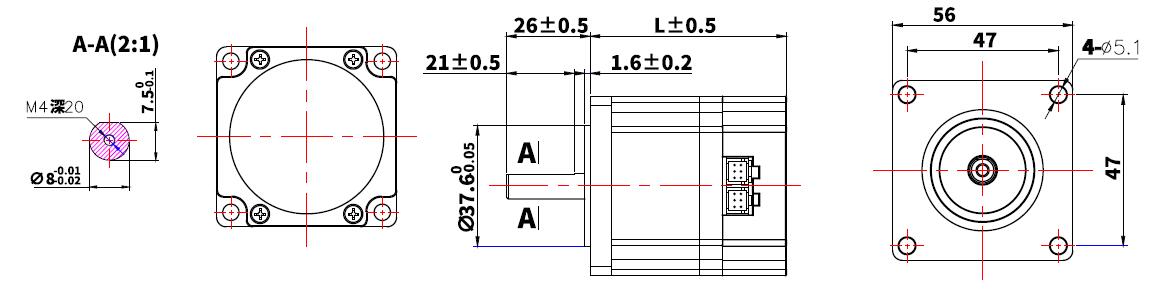
Port Definition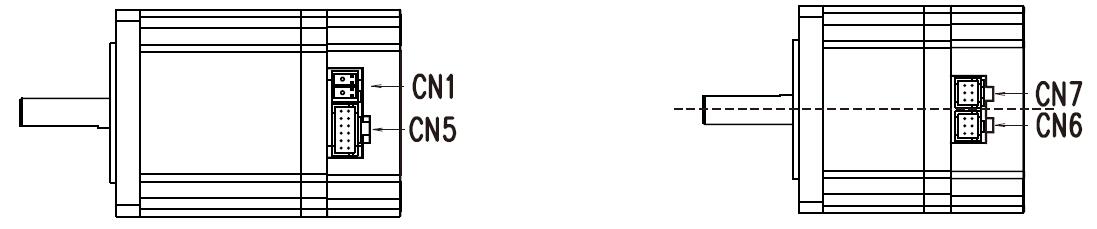
| Terminal | Name | Description | ||
 | 1 | DC | DC24-36V | |
| 2 | GND | Ground | ||
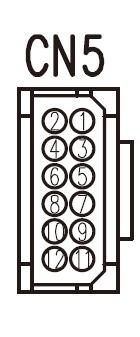 | 1 | D01 | Output Terminal 1 | Function depends on the user' setting |
| 2 | D01- | |||
| 3 | D02 | Output Terminal 2 | ||
| 4 | D02- | |||
| 8 | DI1 | Input Terminal 1 | ||
| 5 | DI2 | Input Terminal 2 | ||
| 6 | DI3 | Input Terminal 3 | ||
| 7 | DI_COM | The common terminal of the input terminal, Used to drive the input optocoupler, Connect DC12-24V (common positive NPN connection) or OV (common negative PNP connection) Current>100mA | ||
| 9 | DIR | Direction Control Signal Input | DC5-24V | |
| 10 | DIR- | |||
| 11 | PULS | Pulse Control Signal Input | ||
| 12 | PULS- | |||
| Terminal | Name | Description | ||
CN6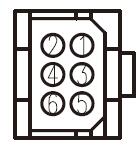 | 1 | 485A/T | RS485 | |
| 2 | NC | Reserved | ||
| 3 | 485B/T | RS485 - | ||
| 4 | NC | Reserved | ||
| 5 | GND | Ground | ||
| 6 | NC | Reserved | ||
| CN7 | 1 | 485A/T | RS485 | |
| 2 | SWCLK/T | Program upgrade clock line | ||
| 3 | 485B/T | RS485 - | ||
| 4 | SWDIO/T | Program upgrade data line | ||
| 5 | GND | Ground | ||
| 6 | 3.3V | communication 3.3V power supply | ||
| input power | The allowed input voltage of different models of AIMotor motor is not consistent. Please see the motor specifications for details Dc power input, pay attention to the positive and negative electrodes of the power supply | |
| operating environment | temperature | Working: 0℃ ~ 55℃ Storage: -20℃ ~ 80℃ |
| humidity | Less than 90% (no condensation) | |
| control method | ① position control ② speed control ③ torque control ④ communication control | |
| control characteristic | Speed frequency response: ≥200Hz | |
| Velocity fluctuation: < ±0.03 (load 0 ~ 100%) : < ±0.02×(0.9 ~ 1.1) supply voltage | ||
| Receiving pulse frequency ≤100kHz | ||
| control input | 01, servo enable; 02, alarm clearance; 03, multi-segment enable; 04, multi-segment select 1; 05, many paragraphs choose 2; 06, forward overrange; 07, reverse overrange; 08, positive turn point; 09, reverse point movement; 10. Origin switch 11, origin enable; 12. Emergency shutdown; 13. Pulse prohibition; 14. Remove position deviation; | |
| Control output | 01, the servo is ready to output; 02. Complete the output of positioning; 03, fault alarm output 04. Confirm the origin back to zero output; 05, electrical confirmation back to zero output; 06, torque to the output; 07, the speed reaches the output; | |
| position control | Pulse mode: pulse direction; A plus B orthogonal pulse The electronic gear ratio defaults to 131072:1000, that is, 1000 pulses per turn Maximum pulse receiving frequency <=100KHZ | |
| Internal 4 section position mode: 1. Single cycle operation; 2, automatic cycle operation; 3. Multi-segment DI switch operation | ||
| Communication control mode: RS485 Modbus_Rtu controls the corresponding communication location and address | ||
| speed control | Internal 4 speed mode: 1, single cycle operation; 2, automatic cycle operation; 3. Multi-speed DI switching operation | |
| Communication control mode: RS485 Modbus_Rtu controls the corresponding communication speed address | ||
| torque control | Communication control mode: RS485 Modbus_Rtu controls the corresponding communication torque address | |
| Acceleration and deceleration function | The time of ACC/DEC:1~65535 ms(0 r/min ~ 1000 r/min) | |
| Monitor function | Current speed, DI input, DO output, current position, command input pulse accumulation, average load rate, position deviation count, motor phase current, bus voltage value, module temperature, alarm record, command pulse frequency corresponding speed, running state, etc | |
| protect function | vervoltage and undervoltage of the main power supply, overspeed, overcurrent, overload, abnormal encoder, abnormal position, blocked rotation, abnormal parameters, etc | |
| Return to origin function | 13 autonomous (search) ways to return to the origin, as well as the origin offset function. | |
| RS485 function | It follows the standard ModBUS-RTU protocol One point two communication interface, convenient network parallel | |
| gain adjustment | Manually adjust Internal rigidity grade table adjustment | |
Connect to many slave stations via PLC device, with Simens S7-200Smart as an example: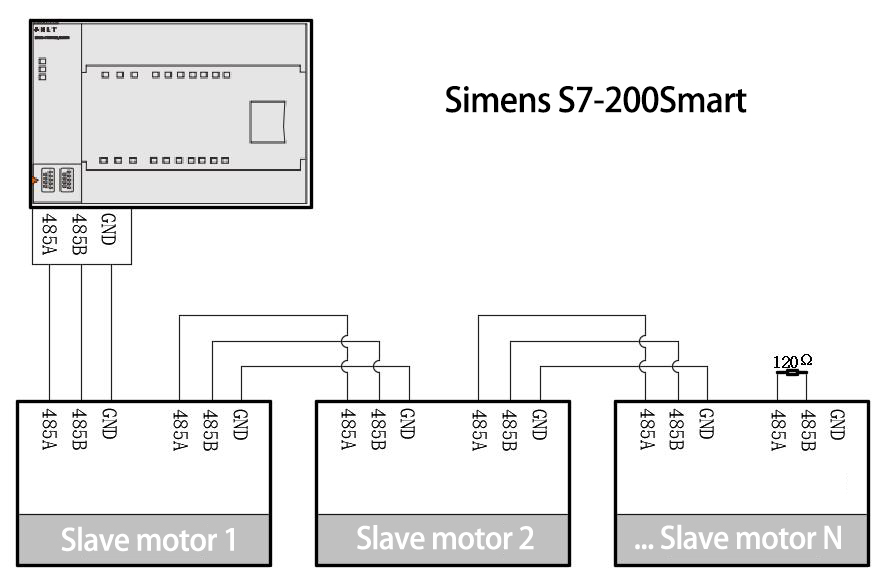
Host computer debugs a connection: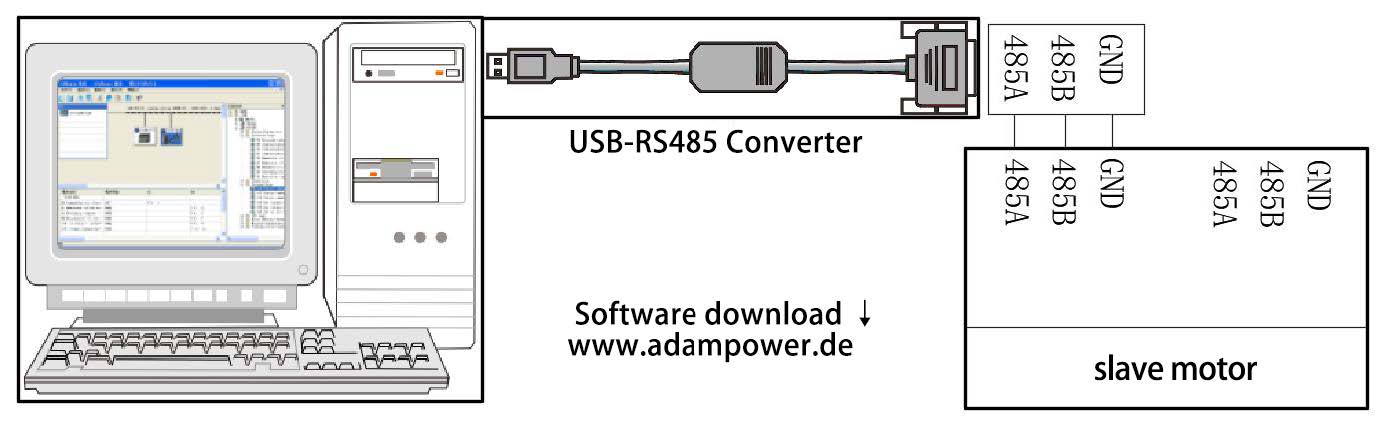

AIS series Integrated DC Servo Motor Software #ADMotor works well in PC, please download software
AIS Series RS485 Integrated Servo Motor User Manual 
More Information on detail, please feel free to contact me 
- Availability: In Stock
- Model: AIS57,60,86
- Brand: Adampower
