


EtherCAT Stepper Motor, EtherCAT Integrated Stepper Motor
Waterproof EtherCAT Integrated Stepper MotorIEC57/60/86 EtherCAT Integrated Stepper Motor (Closed Loop)

Product Introduction
IEC57/60/86 is a newly introduced one-bus type close-loop stepping driver of EtherCAT, which adopts the latest floating-point 32-bit MCU digital processing technology. It employs advanced variable current technology and advanced frequency conversion technology to control the driver, resulting in small motor vibration, smooth operation, and excellent high-speed performance. Users can set any ID address within 1-255, meeting the needs of most applications. Medium and high-speed operation is very smooth with ultra-low noise.
Characteristics
- New floating-point 32-bit MCU technology
- Whole machine dust and water resistant design, IP65 rating
- 1 channel optocoupler isolated OC output
- With serial port settings and debugging functionality
- Current control reduces motor heating significantly
- Encoder with 4000 lines (standard)
- 57 closed-loop stepper motor, 1 N.m, 2.8 N.m
- 3 channels of optically-isolated signal input, with 2 channels being high-speed optocoupler isolated
- Communication frequency of 100 MHz
- Current can vary between 0.5-8 A with load variations
- 1.2 times overload capability
- Factory default subdivision is set to 50000 (modifiable via software)
Application
Suitable for a variety of small and medium-sized automatic equipment and instruments, such as: engraving machine, marking machine, cutting machine, medical equipment, laser phototypesetting, plotter, CNC machine tools, automatic assembly equipment. Ideal for applications where the user expects low noise, low vibration, low heat and high speed.
Electrical Characteristics
| Explanation | IEC57/60/86 | |||
|---|---|---|---|---|
| Min | Typ | Max | Unit | |
| Continuous output current | 0.5 | - | 8.0 | A |
| Power Supply Voltage (DC) | 20 | 24/36 | 50 | Vdc |
| Control signal input current | 6 | 10 | 16 | mA |
| Logic input voltage | 5 | 5 | 24 | Vdc |
| OC output pull-up voltage | 5 | - | 24 | Vdc |
| EtherCAT frequency | - | 100 | - | MHz |
| Insulation Resistance | 100 | - | - | MΩ |
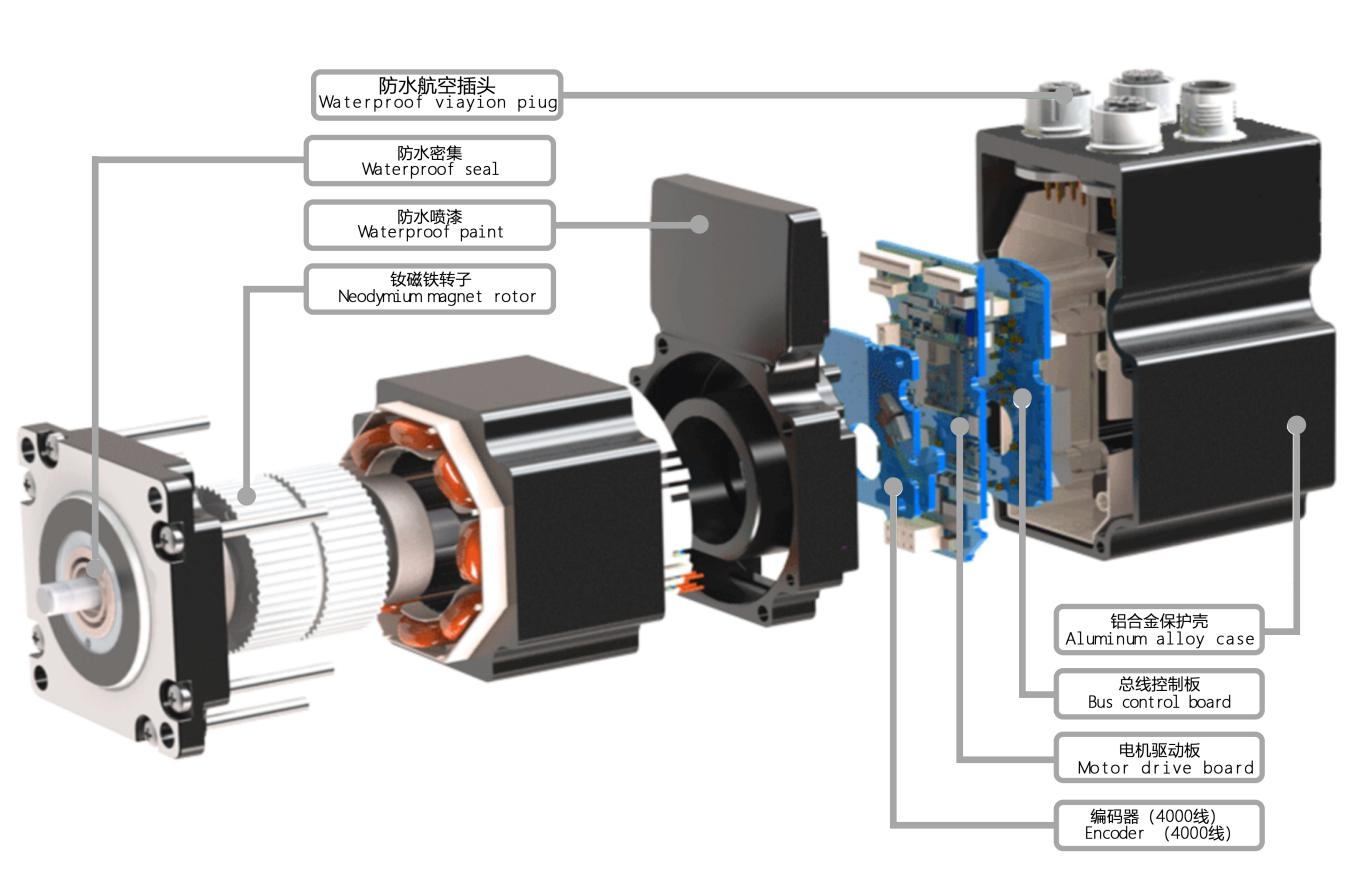
Structure Installation
Waterproof plug, waterproof seal, waterproof paint, and Neodymium magnet rotor, 4000 line Encoder.
Model Number
| Model No | Holding Torque | Controller Encoder Stepper Motor Length | Weight |
|---|---|---|---|
| N.m | mm | kg | |
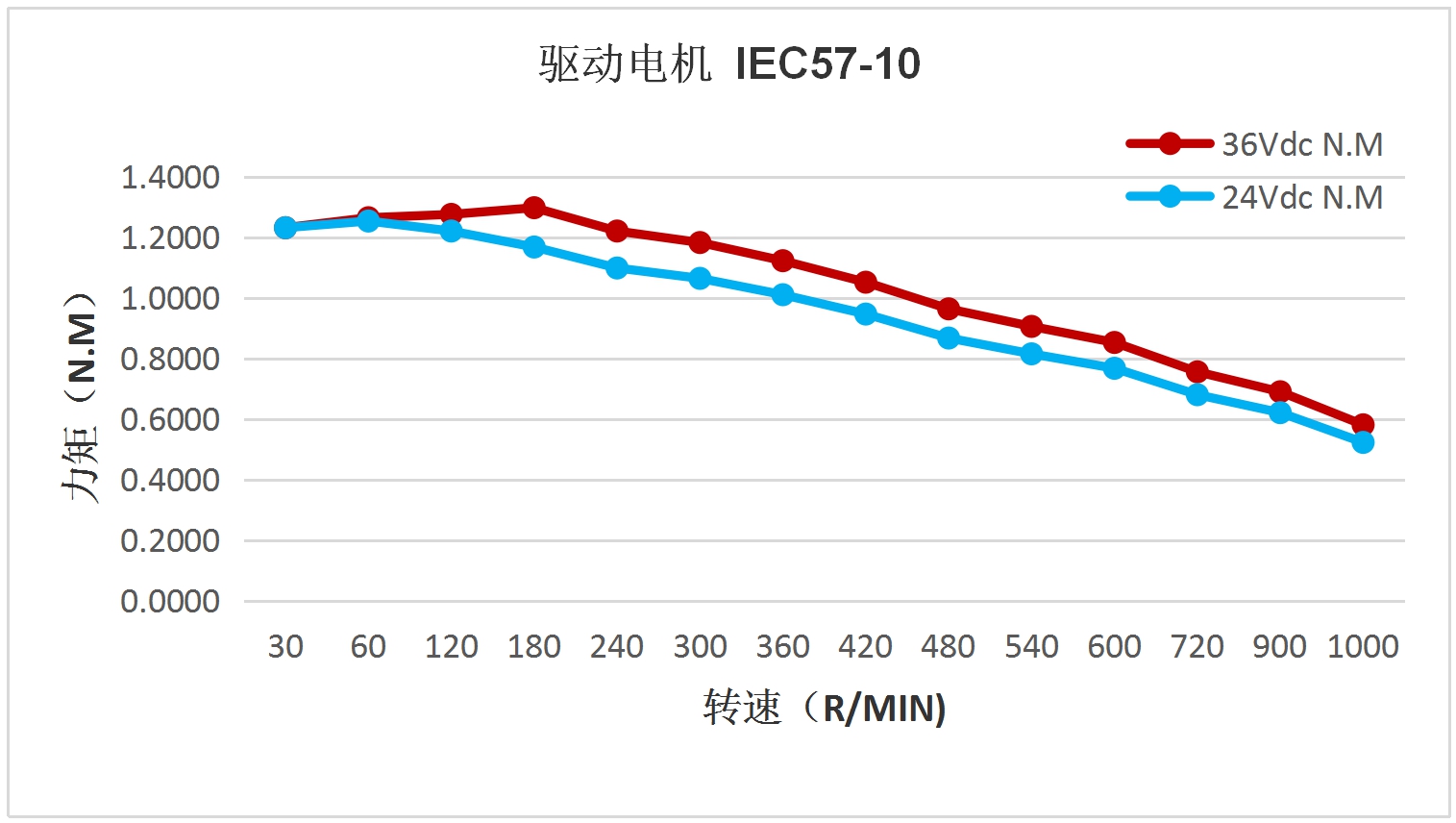
| IEC57-10 | 1.2 | 107 ± 1 | 1.9 |
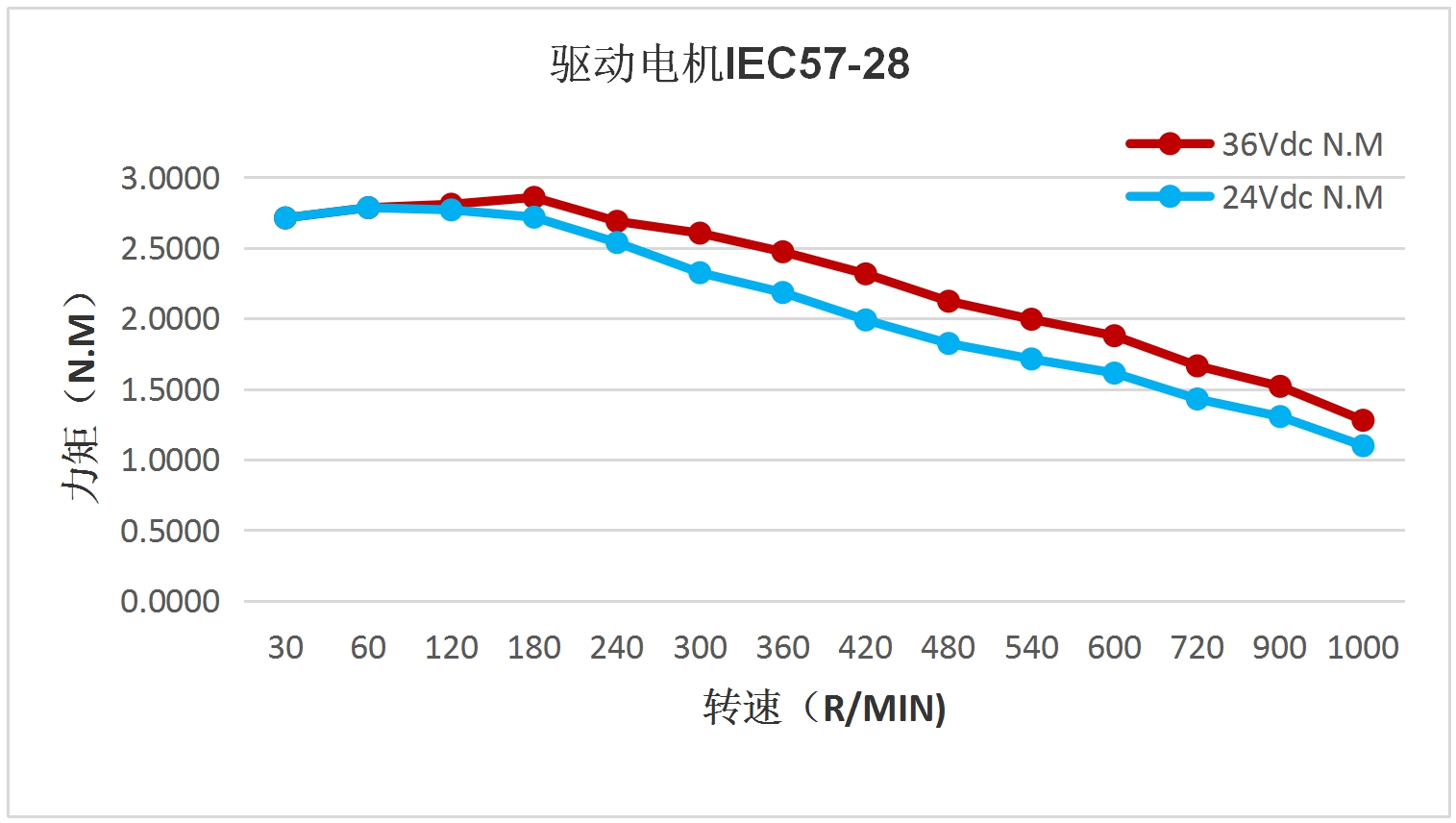
| IEC86-45 | 2.8 | 133 ± 1 | 2.2 |
| IEC60-40 | 4.0 | 142 ± 1 | 2.2 |
| IEC86-45 | 4.5 | 136 ± 1 | 2.3 |
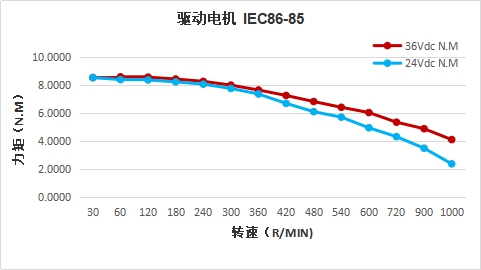
| IEC86-85 | 8.5 | 173 ± 1 | 3.8 |
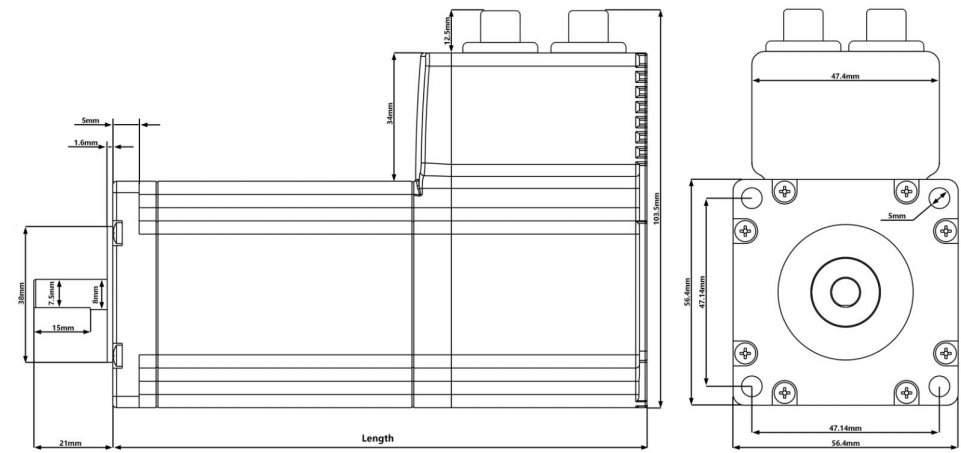
Dimensions & Torque Curves
IEC57 Dimensions
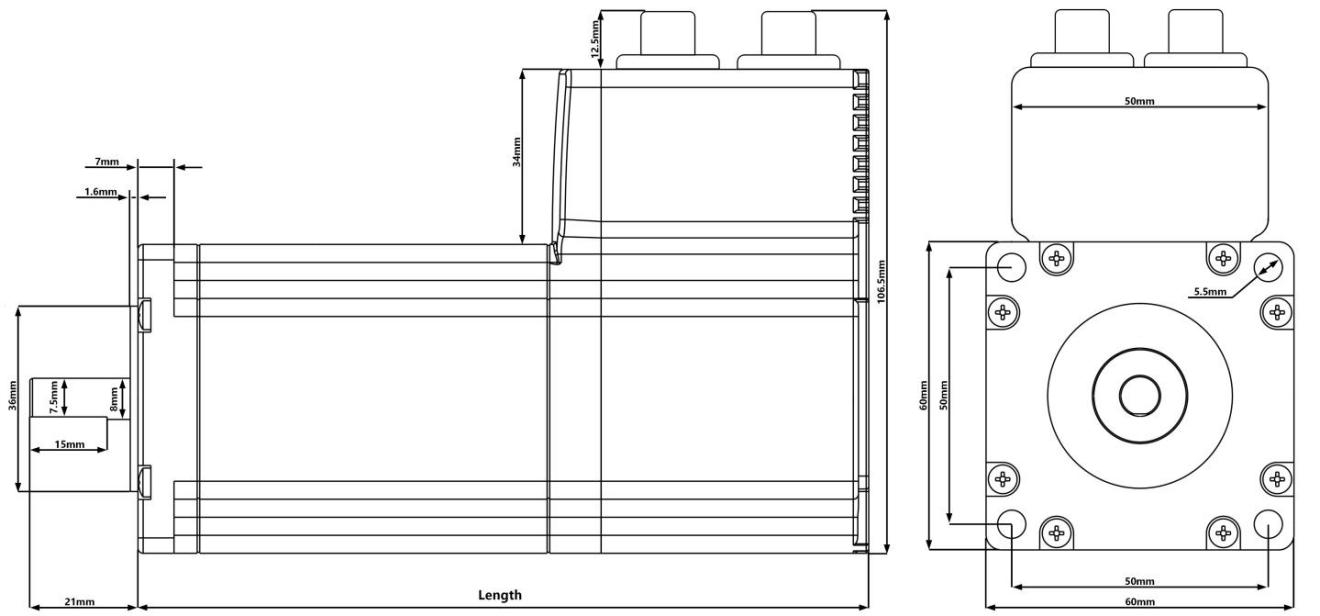
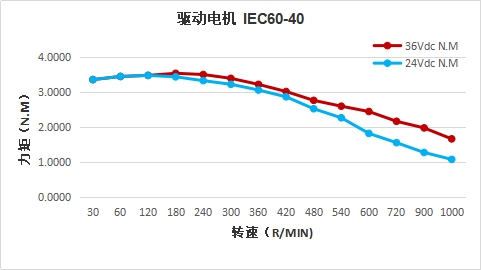
IEC60 Dimensions
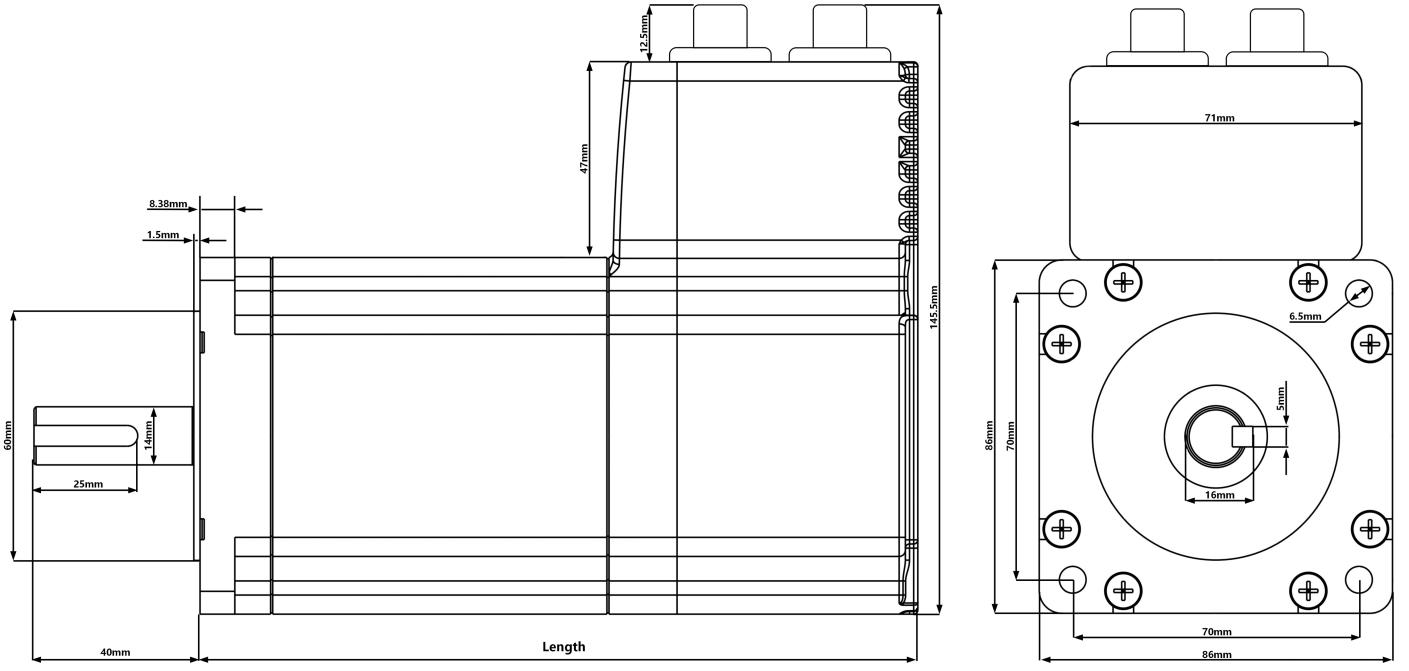
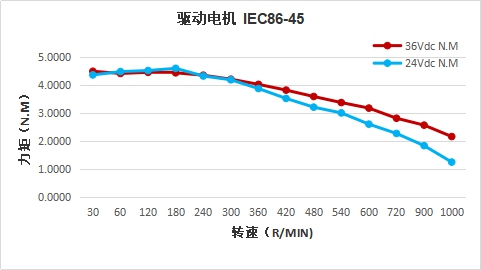
IEC86 Dimensions
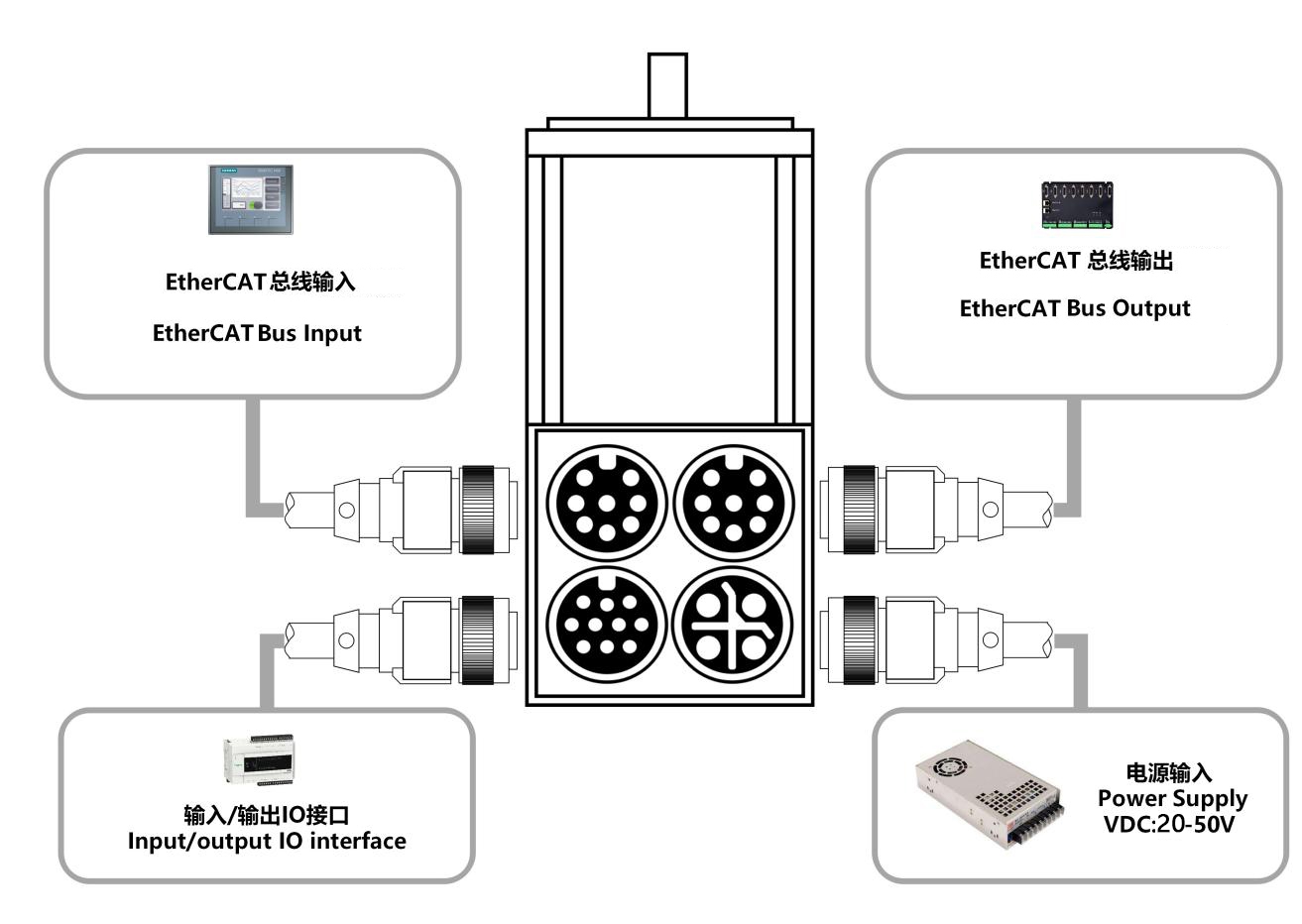
Wiring & Port Definition
Schematic Diagram of Wiring
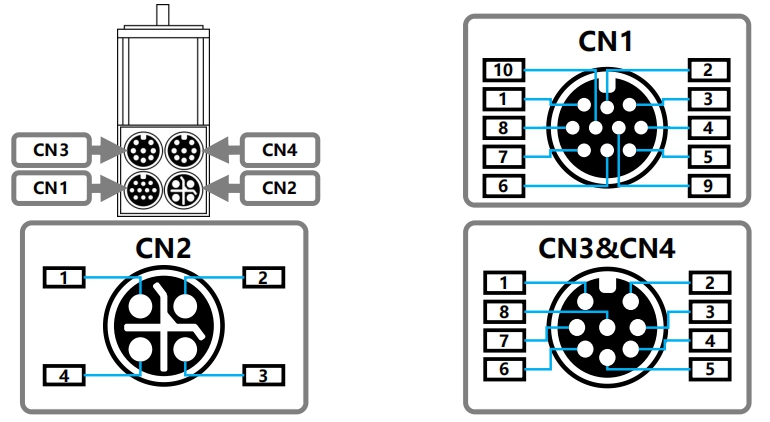
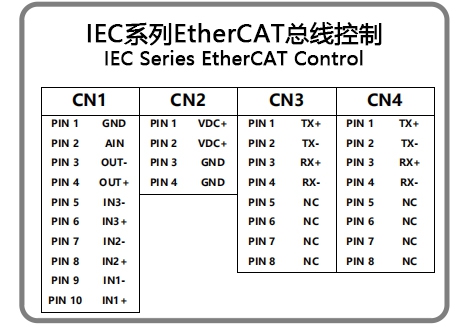
Port Definition
Protocol Specification
- 6060h = 1 — PP Mode, profile position mode
- 6060h = 3 — PV Mode, profile velocity mode
- 6060h = 6 — HM Mode, Homing mode
- 6060h = 8 — CSP Mode, Synchronous position mode
IEC Series EtherCAT Integrated Stepper Motor User Manual 
EtherCAT Slave Information (xml) ![]()
Application Scenarios
- CNC machine tools — High-speed precision positioning with closed-loop feedback
- Engraving & marking machines — Smooth operation with ultra-low noise
- Medical equipment — Low vibration and low heat for sensitive environments
- Automatic assembly equipment — IP65 rated, dust and water resistant for industrial use
More Information on detail, please feel free to contact me
- Availability: In Stock
- Model: IEC57,60,86
- Brand: Adampower
Write Review
-
 NEMA8 Stepper Motor
$35.00
NEMA8 Stepper Motor
$35.00 -
 NEMA11 Stepper Motor
$36.00
NEMA11 Stepper Motor
$36.00 -
 NEMA14 Stepper Motor
$37.00
NEMA14 Stepper Motor
$37.00 -
 NEMA17 Stepper Motor, 42mm Stepper Motor
$36.00
NEMA17 Stepper Motor, 42mm Stepper Motor
$36.00 -
 NEMA16 Stepper Motor, 39mm Stepper Motor
$36.00
NEMA16 Stepper Motor, 39mm Stepper Motor
$36.00 -
 NEMA23 Stepper Motor, 57mm Stepper Motor
$39.00
NEMA23 Stepper Motor, 57mm Stepper Motor
$39.00 -
 NEMA6 Hollow Shaft Stepper Motor, 14mm Stepper Motor
$80.00
NEMA6 Hollow Shaft Stepper Motor, 14mm Stepper Motor
$80.00 -
 NEMA8 Hollow Shaft Stepper Motor, 20mm Stepper Motor
$35.00
NEMA8 Hollow Shaft Stepper Motor, 20mm Stepper Motor
$35.00 -
 NEMA11 Hollow Shaft Stepper Motor, 28mm Stepper Motor
$35.00
NEMA11 Hollow Shaft Stepper Motor, 28mm Stepper Motor
$35.00 -
 NEMA14 Hollow Shaft Stepper Motor
$36.00
NEMA14 Hollow Shaft Stepper Motor
$36.00 -
 NEMA17 Hollow Shaft Stepper Motor
$37.00
NEMA17 Hollow Shaft Stepper Motor
$37.00 -
 NEMA23 Hollow Shaft Stepper Motor
$40.00
NEMA23 Hollow Shaft Stepper Motor
$40.00 -
 NEMA34 Hollow Shaft Stepper Motor
$78.00
NEMA34 Hollow Shaft Stepper Motor
$78.00 -
 NEMA8 Stepper Ball Screw Linear Actuators
$126.00
NEMA8 Stepper Ball Screw Linear Actuators
$126.00 -
 NEMA8 Stepper Lead Screw Linear Actuators
$55.00
NEMA8 Stepper Lead Screw Linear Actuators
$55.00 -
 NEMA6 Stepper Ball Screw Linear Actuators
$110.00
NEMA6 Stepper Ball Screw Linear Actuators
$110.00 -
 NEMA11 Stepper Ball Screw Linear Actuators
$55.00
NEMA11 Stepper Ball Screw Linear Actuators
$55.00 -
 NEMA14 Stepper Ball Screw Linear Actuators
$55.00
NEMA14 Stepper Ball Screw Linear Actuators
$55.00 -
 NEMA17 Stepper Ball Screw Linear Actuators
$58.00
NEMA17 Stepper Ball Screw Linear Actuators
$58.00 -
 NEMA23 Stepper Ball Screw Linear Actuators
$58.00
NEMA23 Stepper Ball Screw Linear Actuators
$58.00



















