


NEMA14 Integrated Stepper Motor with Multi-turn Absolute Encoder
multi-ring absolute encoder
The IS14 series integrated motor is the perfect combination of drive and stepper motor,
which perfectly integrates stepper motor and drive technology, also built in a battery free
1023 turn mechanical absolute value encoder, it can save installation space,
Simultaneously saving design and production costs, supporting RS485 instruction control.
| Item | Specifications |
| Stepper Motor Size | NEMA14 |
| Encoder type | 1023 ring absolute encoder |
| Working voltage | 8-36V |
| Driver Current | 0.2-2.0A |
| Velocity range | Up to 3000RPM |
| Control Method | RS485 √ Pulse& Direction, Twin-Pulse, I/O, Built-in Program |
| Torque value | 0.1 - 0.4Nm |
| Nonvolatile storage | Configuration parameters are stored in FLASH inside the MCU |
| DI and DO | 2 DI, 1 DO |
| Protection | Overvoltage, undervoltage, overcurrent, open winding, position deviation |
| Digital Input (2) | Receive 3.3-24VDC | ||
| Digital Output(1) | Maximum withstand voltage of 30V, | ||
| Maximum input or output current 30mA | |||
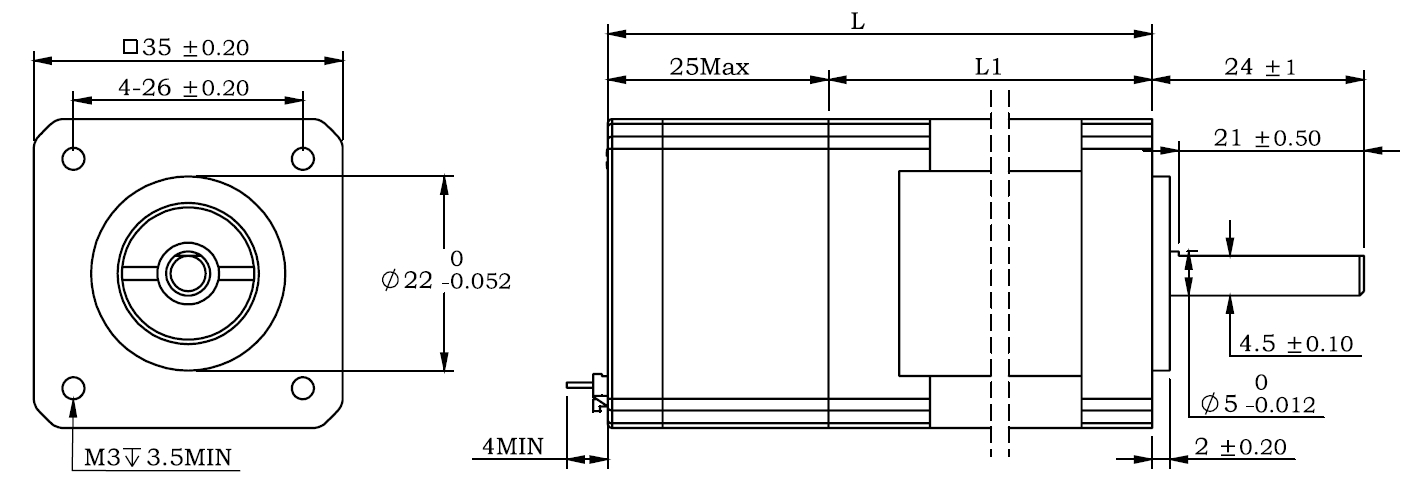
Motor Parameters
| Model No. | length mm L | Shaft length mm | Shaft dia. mm | Phase current A | Resistance Ω | inductance mH | Hold torque N.m | Inertia g.cm² | Weight g |
| IS14010 | 52 | 24 | 5 | 1.0 | 2.55 | 2.0 | 0.1 | 12 | 240 |
| IS14020 | 62 | 24 | 5 | 1.5 | 1.65 | 2.1 | 0.2 | 20 | 300 |
| IS14040 | 80 | 24 | 5 | 1.8 | 1.85 | 2.8 | 0.4 | 35 | 350 |
Wiring Diagram: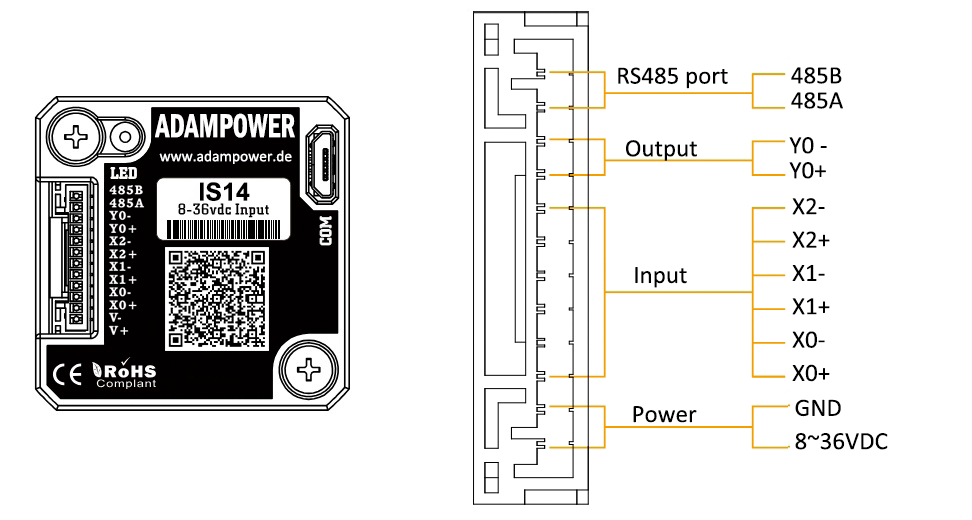
Terminal Definition
| Terminal | Name | Description | |
| 1 | V | 8-36VDC | |
| 2 | V- | GND | |
| 3 | X0 (PU ) | Optoelectronic isolation, differential, High level can directly receive 3.3-24VDC, with a minimum pulse width of 2us, The maximum pulse frequency is 400KHz, which can be used as a universal input port for Pulse/Direction | |
| 4 | X0-(PU-) | ||
| 5 | X1 (DR ) | ||
| 6 | X1-(DR-) | ||
| 7 | X2(EN ) | Optoelectronic isolation, differential, High level can directly receive 3.3-24VDC, with a minimum pulse width of 100us, The maximum pulse frequency is 10KHz, which can be used as a universal input port for Enable | |
| 8 | X2-(EN-) | ||
| 9 | Y0 (AL ) | The default alarm output port can detect the driver alarm status and provide feedback to the main station. Other functions can be set through communication | |
| 10 | Y0-(AL-) | ||
| 11 | 485A | RS485 Communication port, default baud rate is 115200 | |
| 12 | 485B | ||
Block Diagram:
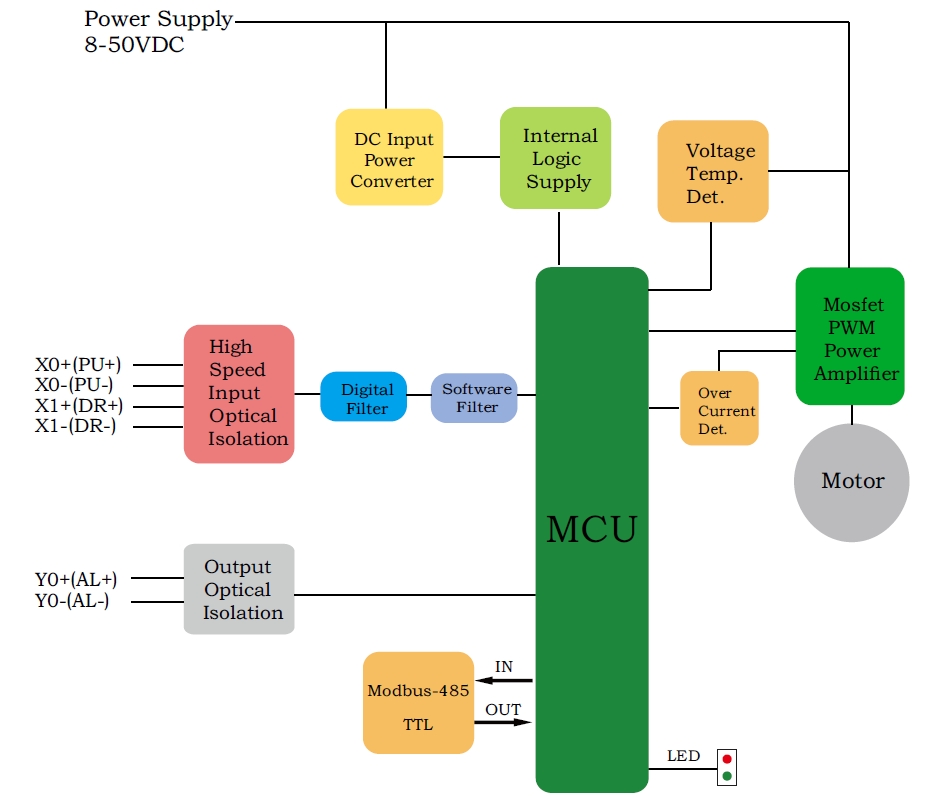
2 Input signals can directly receive 3.3-24V DC levels at high levels, Max. frequency of 400KHZ.
X0: pulse input, IO start/stop, limit, direction, universal input.
X1 pulse input, IO start/stop, limit, direction, universal input.
1 Output signal, maximum withstand voltage 30V, maximum input or output current 30mA
Y0 : alarm output, universal output, and factory default alarm output.
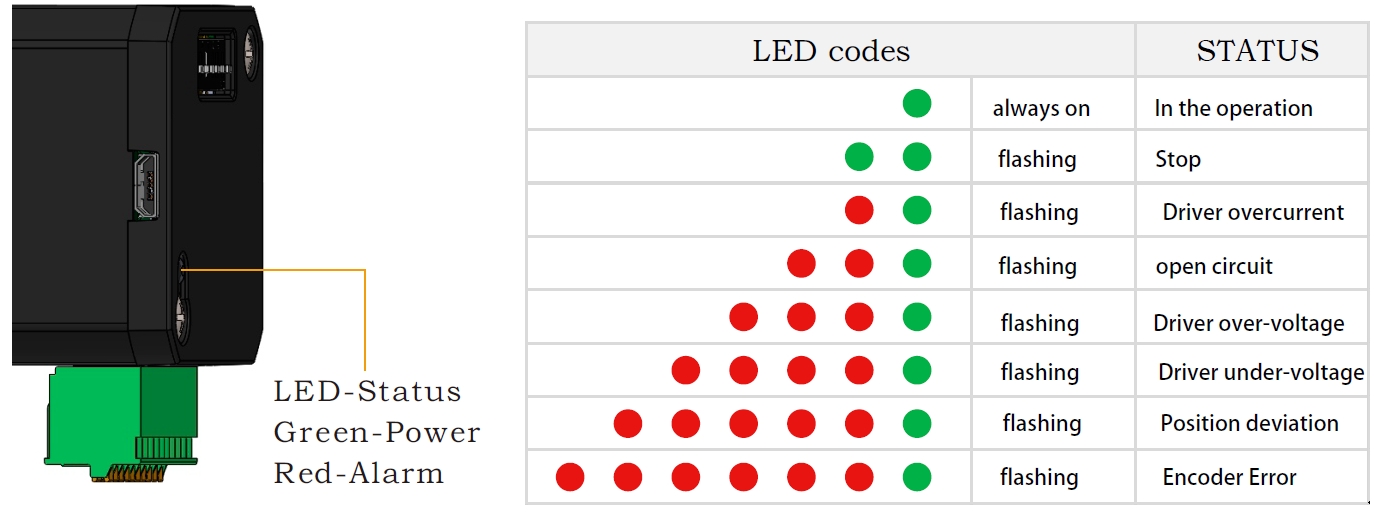
LED indicator and status:
CRC Check routine by C# :
Uint16 Funct_CRC16(unsigned char * puchMsg, Uint16 DataLen)
{
Uint16 i,j,tmp;
Uint16 crcdata=0xFFFF;
for(i=0;i<DataLen;i )
{
crcdata=(*puchMsg)^crcdata;
puchMsg ;
for(j=0;j<8;j )
{
tmp=crcdata&0x0001;
crcdata=crcdata>>1;
if(tmp){
crcdata=crcdata^0xA001;
}
}
}
returncrcdata;
}
Software Modbus Poll 
Software Adampower
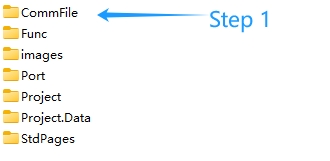
1. Extract the zip file, open CommFile folder and Click Step-Config.exe or Adampower.exe

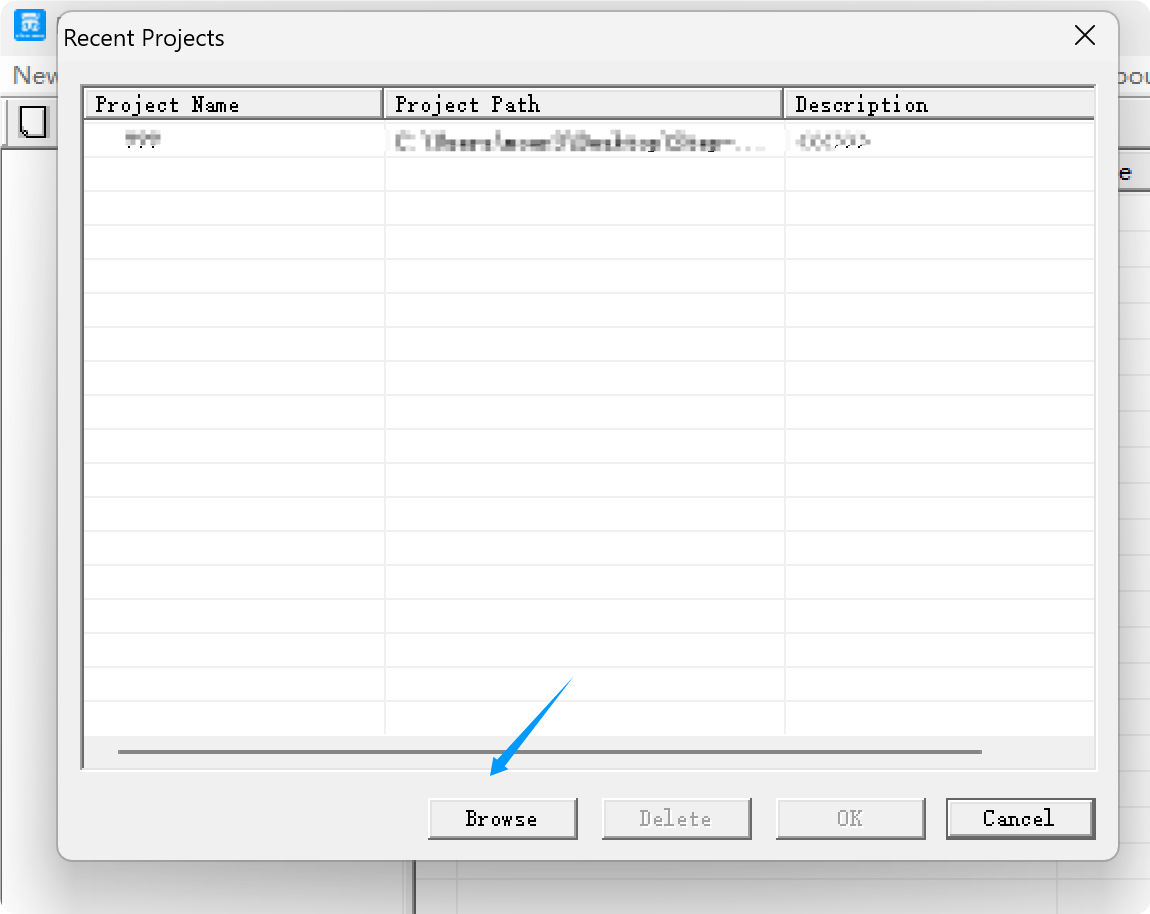
2. Open Project.

3. Click Browse
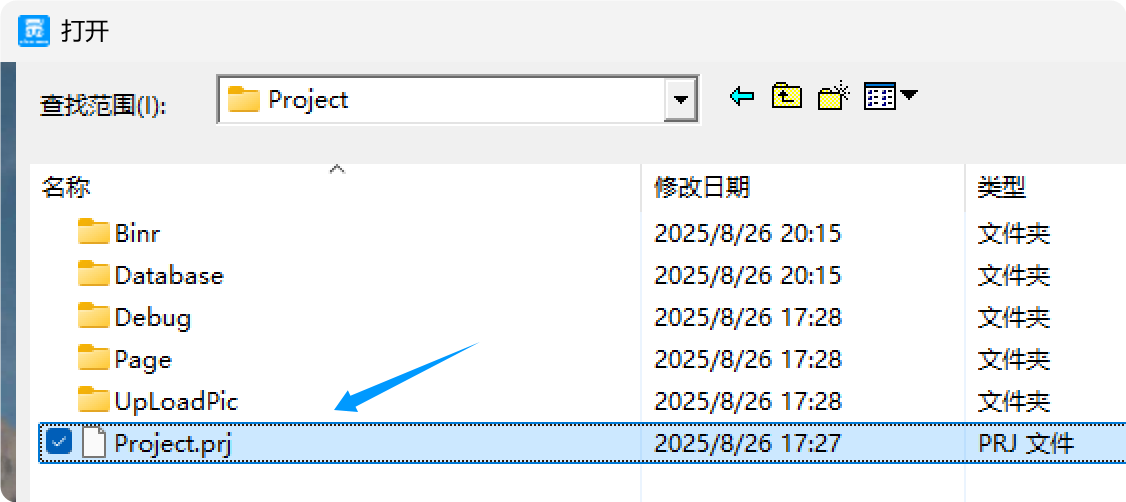
4. Select the Project.prj in the Project folder, in the same path as CommFile.
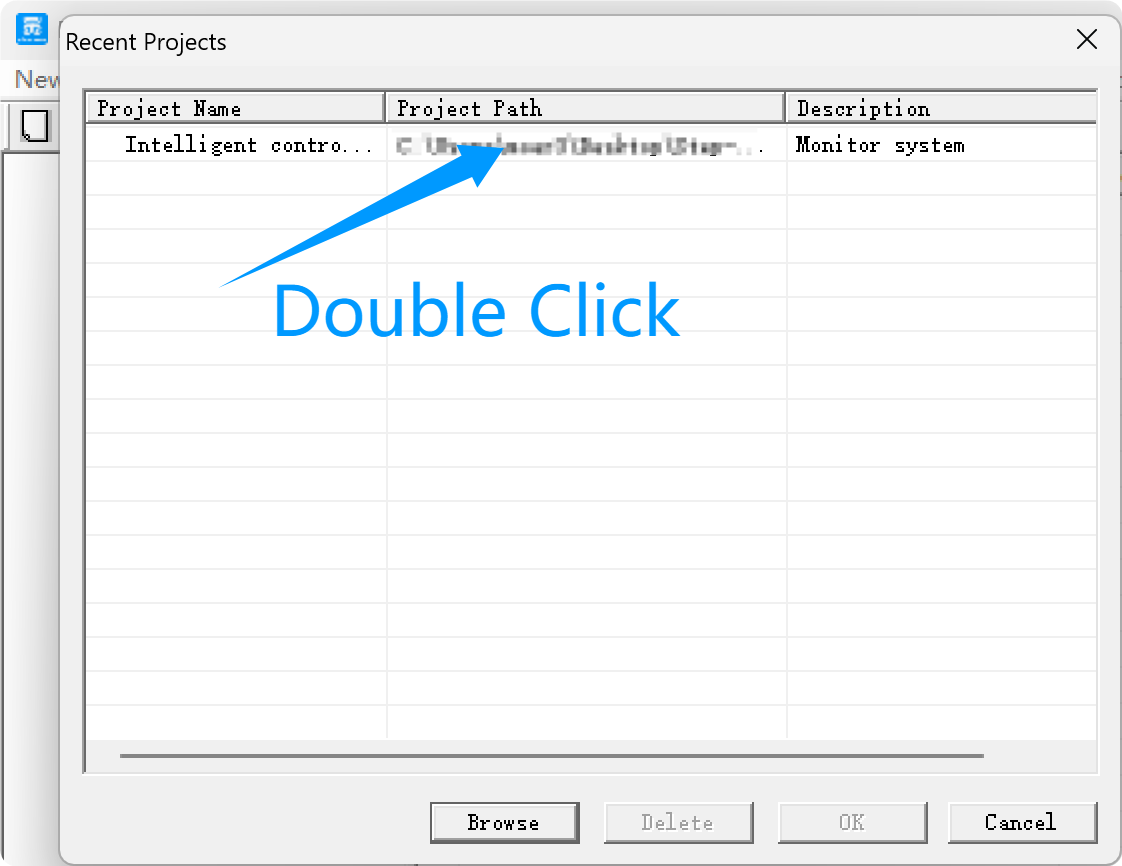
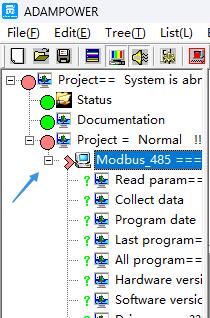
5. Double Click the Project.prj path
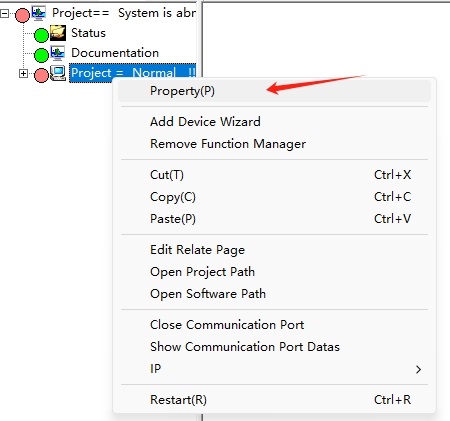
6. Right Click Modbus_485, and Click Property:
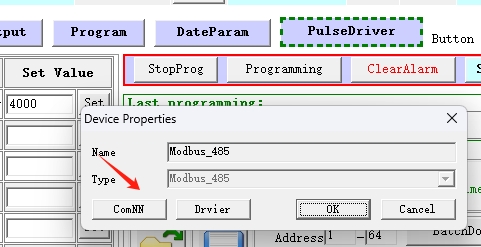
7. Click Property ComNN, Choose COM port, Baud rate and click Save and OK.

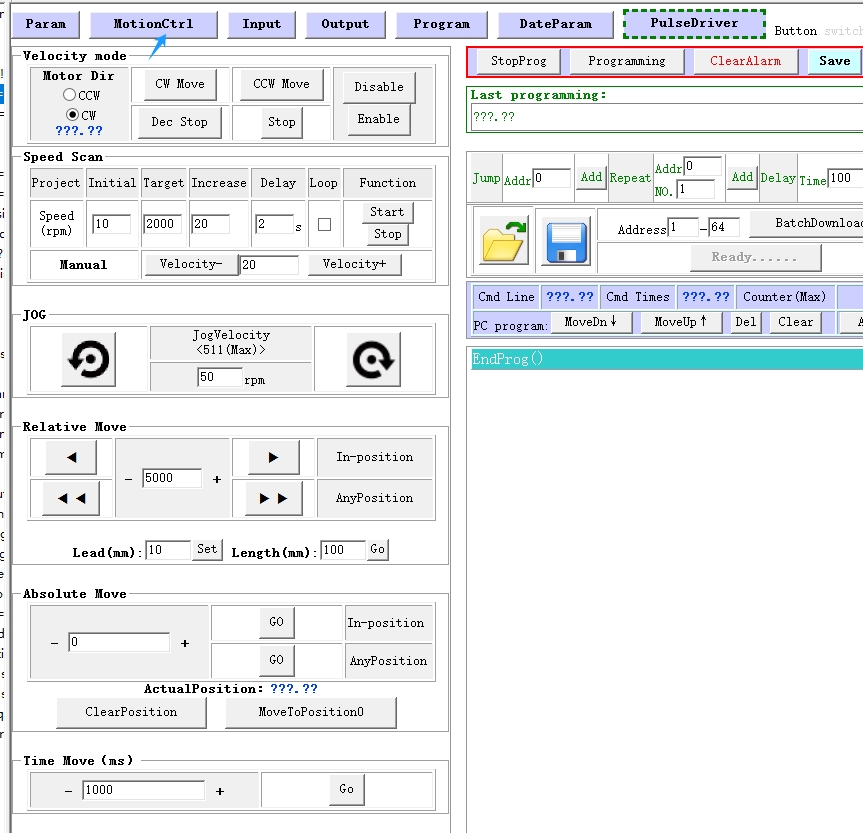
8. Start to use software control the RS485 Integrated stepper motor by below buttons:
RS485 Stepper Motor Controller Manual 
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
Block Diagram:
2 Input signals can directly receive 3.3-24V DC levels at high levels, Max. frequency of 400KHZ.
X0: pulse input, IO start/stop, limit, direction, universal input.
X1 pulse input, IO start/stop, limit, direction, universal input.
...
1 Output signal, maximum withstand voltage 30V, maximum input or output current 30mA
Y0 : alarm output, universal output, and factory default alarm output.
LED indicator and status:
more Information on detail, please feel free to contact me 
- Availability: In Stock
- Model: IS14010
- Brand: Adampower